Media Summary: A waypoint can describe by a variable. Go to the Advanced Tab/Assignment to create a variable. A variable has to be a pose. Course: Technical and Bossiness Writing Project: Creation of This tutorial walks you through all the steps of configuring a tool/end-effector: 00:00 Introduction 00:20 Teach TCP 01:27 Test TCP ...
Direction Command Basic Programming Ur Robot - Detailed Analysis & Overview
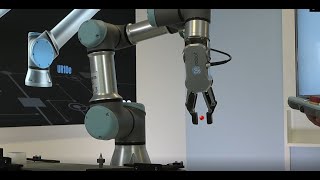
A waypoint can describe by a variable. Go to the Advanced Tab/Assignment to create a variable. A variable has to be a pose. Course: Technical and Bossiness Writing Project: Creation of This tutorial walks you through all the steps of configuring a tool/end-effector: 00:00 Introduction 00:20 Teach TCP 01:27 Test TCP ... How to use the force sensor to detect objects ( Circle Move with Unconstrained Mode: the tool Basic Programming UR Robot - MoveL - Demo 1
Basic Programming UR Robot - MoveJ - Demo 2