Media Summary: Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and ... DevOps RoadMap,Learn DevOps from the scratch to advanced level. This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of ...
Control Bootcamp Overview - Detailed Analysis & Overview
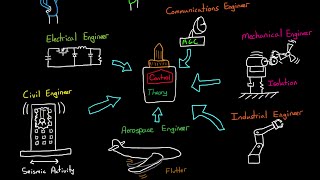
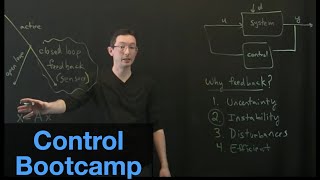
Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and ... DevOps RoadMap,Learn DevOps from the scratch to advanced level. This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of ... Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise ... A Military Bootcamp Show?! “Drill” is available this September on Veterantv.com

![The Kalman Filter [Control Bootcamp]](https://i.ytimg.com/vi/s_9InuQAx-g/mqdefault.jpg)