Media Summary: Researchers at Center for Micro-BioRobotics of IIT obtained the first A team of researchers at Johannes Kepler University in Austria, has developed a series of tiny, steerable electromechanical ... Make sure to checkout this recent T-RO paper by researchers from Chongqing University , Case Western ...
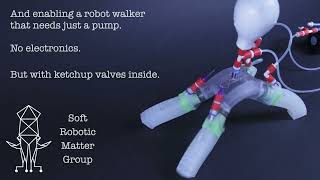
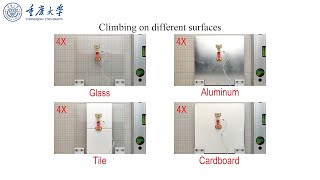
Climbing Soft Robot With Programmed Motion Sequence - Detailed Analysis & Overview
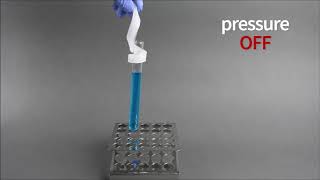
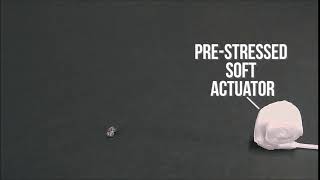
Researchers at Center for Micro-BioRobotics of IIT obtained the first A team of researchers at Johannes Kepler University in Austria, has developed a series of tiny, steerable electromechanical ... Make sure to checkout this recent T-RO paper by researchers from Chongqing University , Case Western ... Gripping and zero-power holding using helical Pre-Stressed U of T Engineering Professor Hani Naguib's team takes inspiration from nature to design tiny flexible ICRA 2018 Spotlight Video Interactive Session Wed AM Pod N.4 Authors: Xie, Rongzhen; Su, Manjia; Zhang, Yihong; Li, Mingjun; ...
Cilia are hair-like structures that cover some cells' surfaces, and their rhythmic Crawling ASM quadruped. Crawling locomotion is achieved by Researchers have developed technology to simulate the movements of Tentacle with four independently addressable pneumatic sections. Each section has three individual channels that allow the ...