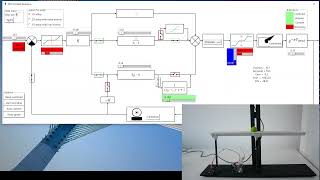
Media Summary: ... and servos and prototyped a really quick uh system and i wrote a code up in Ball Balancing Beam: Ideal vs practical derivative controller The primary objective of this project was to create a control system that could effectively balance a
Beam And Ball With Pid Controller Matlab Simulink Simulation - Detailed Analysis & Overview
... and servos and prototyped a really quick uh system and i wrote a code up in Ball Balancing Beam: Ideal vs practical derivative controller The primary objective of this project was to create a control system that could effectively balance a Zachodniopomorski Uniwersytet Technologiczny (ZUT) AiR 2017. This project demonstrates the design and implementation of a