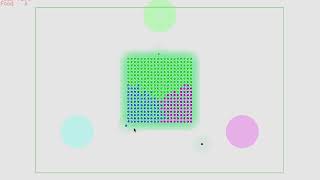
Media Summary: 21-ICRA Experiments: Data-Driven Adaptive Task Allocation for Robot Teams In this simulation, Kilobots choose the nearest In this video, we provide an example to show how human behavior change can modify the optimal team plan for multi-robot
Adaptive Task Allocation Execution - Detailed Analysis & Overview
21-ICRA Experiments: Data-Driven Adaptive Task Allocation for Robot Teams In this simulation, Kilobots choose the nearest In this video, we provide an example to show how human behavior change can modify the optimal team plan for multi-robot Poster presentation for the 8th Annual IC CAE & National Security Education Program Colloquium on April 15th and 16th, 2021 by ... S. Park, Y. D. Zhong, and N. E. Leonard, "Multi-Robot Short paper entitled, "Performance Evaluation of Some
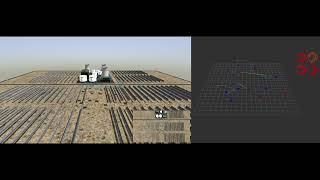
Predictive Multi Robot Task Allocation Algorithm - Thermosolar Radiation Monitoring Based on the P2P-enabled robot MONA, developed by the University of Manchester and Ice Nine, we have built a testbed that ... Grip-that-there”: An Investigation of Explicit and Implicit Behrens J., Stepanova K., Babuska R.: Simultaneous This video presents a distributed comprehensive framework enabling a networked multi-robot system to serve time-varying ... Reactive Task Allocation and Planning of A Heterogeneous Multi-Robot System
This project explores the integration of Large Language Models (LLMs) and Vision-Language Models (VLMs) into robotic ...