Media Summary: See the other videos in this series: This video ... This is a demonstration for coursework related to the Advanced Robotics course at the University of Edinburgh. Robot plans its path back to home position (and configuration) from any position avoiding obstacles. The simulation is ...
3d Motion Planning Using Rrt Connect - Detailed Analysis & Overview
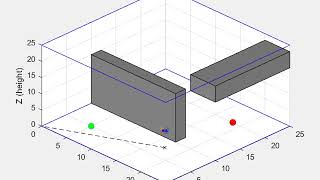
See the other videos in this series: This video ... This is a demonstration for coursework related to the Advanced Robotics course at the University of Edinburgh. Robot plans its path back to home position (and configuration) from any position avoiding obstacles. The simulation is ... Rapidly Exploring Trees searching bidirectionally for a HW 2 Given Start and Goal Configurations. Experimentation was performed on a python-based Quadrotor simulator. Path
A single unknown linear system navigates an unpredictable Implementation of the extend variant of the












![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)






