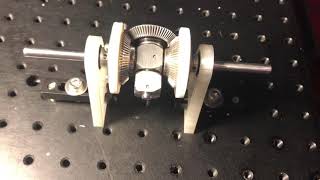
Media Summary: The mechanism topology consists of six moving links, six revolute joints and three bevel gear pairs. Therefore, the The yellow pieces form the semidifferential of Thor. That pieces are placed in the tip of the If you want to build demo of this mechanism you can check this open source jig out: ...
3d Printed Differential Robot Arm Wrist - Detailed Analysis & Overview
The mechanism topology consists of six moving links, six revolute joints and three bevel gear pairs. Therefore, the The yellow pieces form the semidifferential of Thor. That pieces are placed in the tip of the If you want to build demo of this mechanism you can check this open source jig out: ... Engineers get Onshape Professional free up to 6 Months: Check out the Creality K2 Plus ... There's an update: *NOTE:* I've already had some bad experiences with the ... 3d printed robot arm, 50% speed. All joints in motion.
Speeds for J2 and J3 are around 25 RPM, J4 and J5 are around 50 RPM! Want to build your own? Follow the instructions on ... This is an highly experimental test, a sketch really, for a